
Robot Görüşü Sistemleri Nasıl Çalışır?
İşlerimizi yapmamız için gereken sıkıcı ve tekrarlı görevleri otomatikleştirmeye çalışırken makinelere içsel insan kabiliyetleri entegre etmek zorunda kalırız. Bu bağlamda robotlar; nesneleri taşıma, motor beceriler ve görsel işlemler gerektiren görevlerde kullanılırlar. Robotlarda bu tarz otonom işlemleri çoğaltmak oldukça kompleks bir durum haline gelebilir. Üretim tesislerindeki yöneticiler ve mühendisler basitçe bir robotun belirli noktalar arasında bir parçanın taşınması ve yerleştirilmesi gibi işlemleri yapmasını bekleseler de hangi robot görüşü sistemlerinin nerelerde kullanılacağını iyi bilmeleri işlerini kolaylaştıracak ve verimliliği artıracaktır.
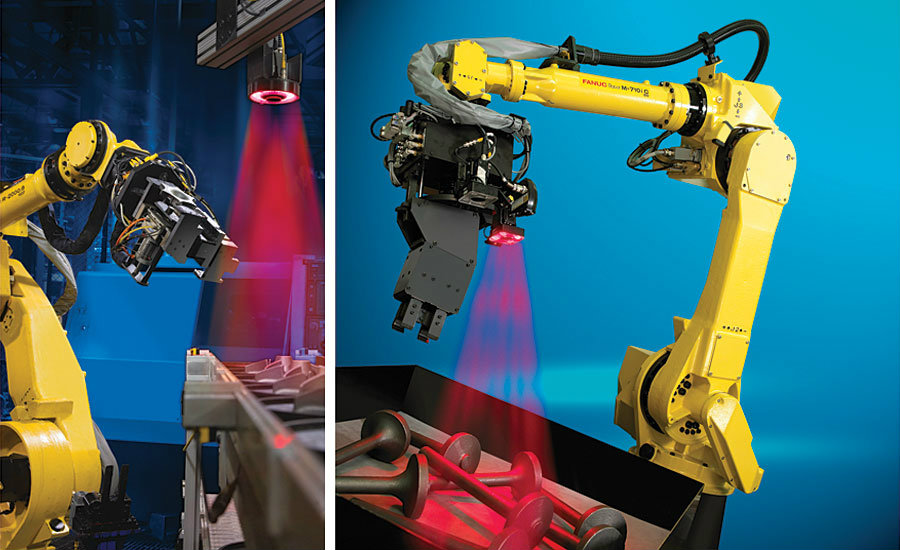
Robotik görüş sistemleri genel anlamda bir veya daha fazla kamera, özel amaçlı aydınlatma, yazılım ve bir robottan oluşur. Kamera, çalışma alanının veya robotun üzerinde işlem yapacağı nesnenin bir resmini çeker. Özel yazılım, görüntünün konumunu ve yönünü belirler. Bu bilgi robot kontrol ünitesine gönderilir ve programlanan pozisyonlar güncellenir. Uygulamaya bağlı olarak, kamera robot üzerine monte edilebilir veya hücre içinde sabit bir konumda olabilir. Görüntü sistemi koordinat uzayını robota bağlamak için genellikle kalibrasyon gereklidir. Bazı robot şirketleri, robot kontrolörü ile sıkı bir şekilde entegre edilmiş görüş yazılımı ile robotik görüş sistemleri sunmaktadır. Bu sayede programlama ve kullanım basitleştirilmektedir.

1, 2 ve 3 Boyutlu Robot Görüşü
Robot görüşü, robotların dünyadaki görsel verileri işlemesine izin vermek için kamera donanımı ve bilgisayar algoritmaları kombinasyonu kullanmasını içermektedir. Örneğin, sisteminizde robotun toplanması için nesneleri tespit eden 2 boyutlu bir kamerası olabilir. Daha karmaşık bir örnek olarak bir robotun hareketli bir araca tekerlekleri monte etmesini sağlamak için 3 boyutlu stereo kamera kullanması gerekebilir. Çoğu mühendislik projesi aslında en basit çözüm arayışıdır. Robotik görüşte bu, şu soruyu ortaya çıkarır: Kaç boyuta ihtiyacınız var? Bu sorunun cevabı genellikle başka bir soruda bulunur: Kaç boyut sınırlayabilirsiniz?
Eğer parçalar bir kutu içinde ise bunlar üç boyut içinde tamamen serbest olurlar. Sisteminizin, parçanın konumunu ve altı eksende yönünü belirlemesi gerekmektedir. Eğer parçalarınız masa veya konveyör gibi bir yüzey üzerinde ise, z ekseni yüksekliği sabittir ve üç boyutlu bir kamera muhtemelen gereksiz olur. Eğer parçalarınız, oluklu veya dar bir yüzeyde olduğu gibi başka bir eksende kısıtlanmışsa; kameranın, parçanın konumunu yalnızca bir eksen boyunca algılaması gerekir.
Tek boyutlu algılama için bir lazer telemetre veya optik mesafe sensörü kullanılabilir.
2 boyutlu görüş sistemleri, 3 boyutlu görüşün artan karmaşıklığı ve hesaplama gereklilikleri nedeniyle 3 boyutlu görüşten daha fazla yaygındır. 2 boyutlu robot görüşü, bir kameradan daha fazlasıdır. Sistemler, birçok durumda robot denetleyici için eklenti paketleri de dahil olmak üzere, aydınlatma, arayüzler ve yazılımları içermektedir.
3 boyutlu görüş birden fazla kamera ve lazer yer değiştirme sistemi içerebilir. Lazer yer değiştirme sistemleri esas olarak LIDAR gibi çalışır. Bu sistem, taranan yüzeyden yansıyan lazer ışığını ölçer. Çoklu kamera sistemleri, bir bölümdeki çoklu perspektiflerden toplanan bilgileri yorumlamak için üçgenleme algoritmalarını kullanır.
Robot Görüşü Sistemlerinde Aydınlatma Problemleri
Herhangi bir makine görüşü uygulamasında ortak problem uygun ve tutarlı bir aydınlatmadır. Sensörlerin ve uygulamaların düzgün çalışması için parlak parçalar, yüzey özellikleri ve ortam aydınlatmasındaki değişimler göz önünde bulundurulmalıdır. Örneğin, sabah ve akşam sorunsuz çalışan bir sistemde gün ortasında içeri giren ışık artışı görüşü değiştireceğinden sorunlara yol açabilir. Günümüzde birçok kamera entegre aydınlatmaya sahip olup, ortam ışığındaki değişikliklerden etkilenmemek için farklı spektrumları kullanırlar. Sisteminizin
düzgün çalışması için ortam aydınlatmasının özelliklerine göre kurulumu oldukça önemlidir.
Sistem Yapılandırması
Bugün fabrikalardaki birçok robot sistemi, tüm yaşam döngüleri için aynı görevi gerçekleştirmeyi amaçlamamaktadır. Sözleşmeler ve talepler değiştikçe bir robotun farklı bir göreve atanması olağan bir durumdur. Dolayısıyla, bir robotik görüş sistemine ihtiyacınız varsa, yeni uygulamalarda robot görüşü sisteminizi yeniden yapılandırmak için de bir bilgiye sahip olmak önemlidir. Daha karmaşık sistemler daha fazla programlama bilgisi gerektirebilir, Yine de birçok sistem kullanıcı dostu konfigürasyon yazılımları ile tasarlanmaktadır. Ssitemde, robotun veya kameranın neleri aradığını, nesnenin nasıl şekillendiğini, nereye baktığını yapılandırmak için araçlarınız olabilir. Bazı eski uygulamalar, görüntüyü yorumlamak için programlamayı ve sistem tarafından sağlanan alt programları çağırmanızı gerektirebilir. Yani hem görüntüyü vermeniz hem de nesne konumunu bulmak için programlama tekniklerini kullanmanız gerekebilir. Gelişmiş sistemlerde ise nesnenin bir CAD modelini vermeniz yeterli olacaktır. Sistem diğer tüm işlemleri kendisi halledecektir. Bu gelişmiş sistemler, kullanıcı dostudur ve konfigürasyonun kolaylıkla yapılabilmesini sağlar. Bu bağlamda bir görüş sistemi seçerken konfigürasyon yazılımı göz önünde bulundurmalıdır. Kullanıcı dostu olmayan sistemlerde şirket içi uzmanlığa sahip olmak ve ilk kurulumdan sonra gelişmiş konfigürasyon değişiklikleri yapmak maliyetli olabilir.

Robot Görüşü Sistemleri Neden Gereklidir?
Robotlar işlerini yaparken tıpkı bizim gibi algı biliş eylem döngüsü içinde hareket ederler. Yani bizler duyu organlarımızla, robotlar ise sensörlerle dış dünyayı algılar değerlendirir ve sonucunda bir eylem oluştururlar. Bir robota görüş sistemi eklemek, en önemli duyu organlarımızdan göz gibi gelişmiş bir algılama sistemi eklemeye benzerdir. Yani robot görüş sistemleri insanla bağdaştırıldığında gözün yaptığı görevlere benzer görevler yapacaktır. Robot görüşü, robotların fiziksel ortamlarına daha uyumlu hale getirilmesini sağlayacaktır. Robotlar genellikle kör makinelerdir. Bir robota bir görüş sistemi eklendiğinde robot çalışma zarfında nesneleri daha tutarlı bir şekilde bulabilir. Robotun daha etkin çalışması, karmaşık ve pahalı demirbaşlara olan ihtiyacı azaltır. Robot üzerinde çalıştığı parçaların boyutundaki, şeklindeki ve konumudaki değişime daha hızlı uyum sağlar. Bu sayede robotik otomasyonun esnekliğini artırılır. Bir robot görüş sistemi ile paketleme , montaj, kalıp kaldırma, parça çıkarma ve ekleme gibi işlemler daha pratik hale gelebilir. Robot görüş sistemleri, hareketli parçaların tespit edilmesi ve üzerinde işlem yapılmasını da kolaylaştırır.
Robot Görüşü Sistemleri Uygulamaları
Robot görüş sistemleri konveyör izleme, paketleme vb. uygulamalarda oldukça yararlıdır. Ürün durmadan bir konveyör üzerindeki robot hücresine taşınır. Bir görüş sistemi, doğru bant konumunu belirler ve robot denetleyici, bant kodlayıcısından hız bilgisi alır. Robot görüş sistemi robotunun, ürün hareket halindeyken onu tespit etmesini sağlar. Bu, bant durdurma veya pahalı boyut tutturma uygulamaları ihtiyacını ortadan kaldırır. Robotu verimli kullanmak için her parçayı kesin olarak aynı konuma ve oryantasyona sunmak yerine, bir görüş sistemi ile hücre tasarımı basitleştirilebilir. Bu sayede maliyetler düşürülür. Robot görüş sistemleri robotik otomasyondan beklenen maliyet düşürme, hız kazanma gibi faydaların en iyi şekilde sağlanmasına yardımcı olur. Gelişmiş robotik görüş sistemleri ile robot baristalar, tarım arazisinde hasat toplayan tarım işçisi robotlar gibi insanların yaptığı çoğu işi etkin bir şekilde yapabilen robotlar görmemiz mümkün olacaktır.
Kaynak: Engineering, Acieta, Hermary







