Katmanlı Üretimde Otonom Örümcek Robotlar
Örümcek İşçiler I Katmanlı Üretim Robotları
Örümcekler yaşadıkları ormanlık alanlardan çıkıp, tasarlandıkları sanal dünya ile Siemens Otomasyon içinde Ürün Tasarımı, Modelleme ve Simülasyon Araştırma grubunun başında yer alan Livio Dalloro gibi insanlar tarafından yaşayan gerçek dünyaya doğru işlerimizi halletmek için yola çıkarıldı. SiSpis veya Siemens Örümcekleri olarak adlandırılan bu robotlar, bir gün sanayi işçilerinin yeni bir türü olabileceklerini bizlere kanıtlayarak, Endüstri 4.0’la insanların yapamadığı işleri yapacak olan robotların neler benzeyeceği konusunda bizlere güzel bir örnek oldu.
SiSpis, Siemens Çevik Üretim Sistemleri (SiAMS) olarak tanımladığımız daha büyük bir resmin bir parçası olmakla beraber Princeton'daki özerk sistemler araştırmalarının da temelini oluşturmaktadır. Örümcek benzeri robotlar tamamen özerk bir şekilde imalata katkı sağlayan ayaklı imalat cihazlarıdır. Siemens, araç gövdeleri, gemi gövdeleri ve uçak gövdeleri gibi işbirliğine dayalı yapısal katmanlı üretim için çoklu özerk robotlar kullanmak istemektedir.
Üç boyutlu baskı olarak da bilinen katmanlı üretim, ürünlerin veya yüzeylerin seçilen bir malzemenin mikro tabakasından sonra katman bırakarak oluşturulduğu veya rafine edildiği bir teknolojidir.

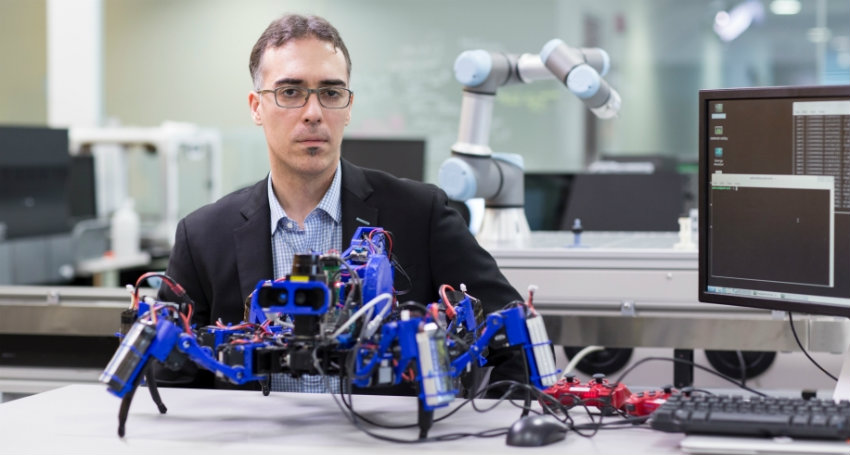
Siemens Corporate Technology'nin Otomasyon ve Kontrol Teknolojisi Alanında Ürün Tasarımı, Modelleme ve Simülasyon Araştırması grubunun başında olan Livio Dalloro, örümcek robotların bir gün endüstri işçilerinin yeni bir türü olabilecek temsilcileri olduğunu öngörüyor. (KAYNAK: SIEMENS)
Örümcek Robotların İşbirliği
Bir gemi gövdesinin büyüklüğündeki bir şeyin iç yüzeyine bir malzeme katmanı eklemek, birkaç örümcekten daha fazlasını gerektiren bir iş olduğundan işbirliğine ihtiyaç duyulması kaçınılmazdır. Böyle bir robot birliğinin birlikte çalışmasının en temel anahtarı ise robotların özerklik şeklidir. Her örümcek, bir iş parçasının yalnızca küçük bir bölümünü üreterek birlikte büyük resmin oluşmasını sağlayabilirler. Bu nedenle örümcek robotların katılması gereken işbirliği türlerinin kavranması ve optimizasyonu oldukça önemli bir konudur. Bu süreç, Dalloro'nun ekibi tarafından geliştirilen, çoklu robot görev planlamasına olanak tanıyan algoritmalar tarafından desteklenmektedir. Böylece, iki veya daha fazla cihazın, katmanlı üretim üzerinde işbirliği yapabilmesi sağlanacaktır.
Dalloro ve ekibi tarafından geliştirilen algoritmalar çoklu robot görev planlamasını sağlamaktadır. Böylece iki veya daha fazla örümcek robot, tek bir cismin veya alanın katmanlı üretimi veya yüzey işlemi üzerinde işbirliği yapabilir. (KAYNAK: SIEMENS)
Örümcek Robotların Çalışma Şekli ve Yapısı
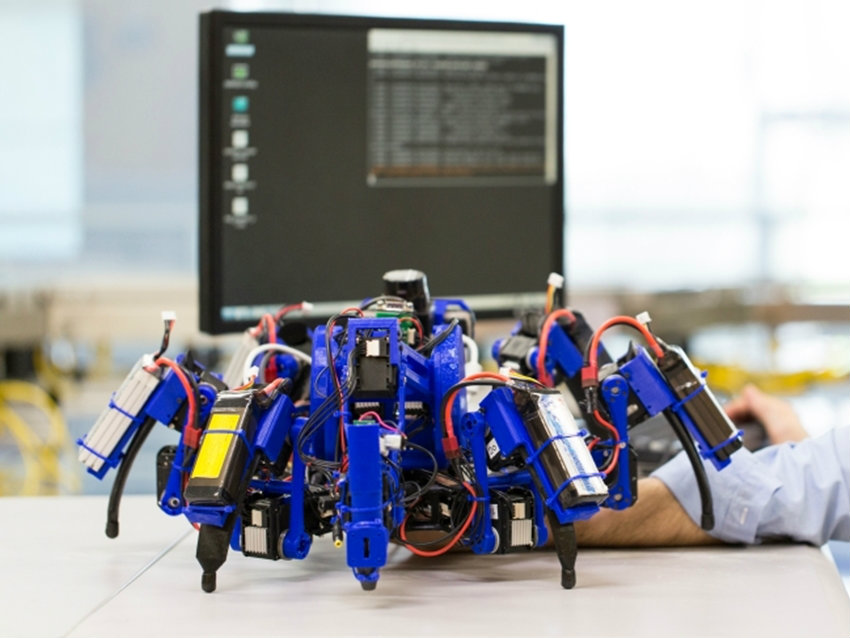
Birden fazla robotun katmanlı üretim üzerinde işbirliği yapabilmesini amacıyla robotlara çevredeki ortamları yorumlayabilmelerini sağlayacak dahili kameralar ve lazer tarayıcı entegre edilmiştir. 3D yazıcı kolu aralığını bilen her robot, bölgenin düz veya eğimli olmasına bakılmaksızın o bölgeden bağımsız olarak çalışabilir ve diğer robotlar da aynı tekniği bitişik alanları kapsamak için kullanırlar. Robotlar, her bir alanı dikey kutulara bölerek, karmaşık geometrileri kapsayacak şekilde işbirliği yapabilir ve hassas bir şekilde çalışabilirler.
Özerklik, ayrıca diğer örümcek davranışlarının merkezi bir parçasıdır. Örümcek robotlar belli bir çevrede nerede olduklarını bilebilirler, pilleri azaldığında, nerede kaldıklarını işbirliği yaptığı diğer örümcek robotlara bildirerek bir şarj istasyonuna geri dönebilirler, yollarında engellerle karşılaştıklarında kendilerine yeni rotalar bulabilirler.
Dalloro'nun ekibi tarafından geliştirilen, bir Siemens PLM yazılım çözümü olan NX'i ROS (Robot Operating System) ile birleştiren bir hibrid yazılım sayesinde örümcekler hızla şekil almaya başlamıştır. Hazır ürünler olan örümceklerin mini motorları ve kabloları hariç olmak üzere, mekanikten yazılıma kadar her şeyi Dallaro ve ekibi geliştirmiştir. Proje, gelişmiş üç boyutlu baskı imalat üzerine odaklanmıştır. Örümcek robot bileşenlerinin her biri sanal dünyada tasarlanıp, üç boyutlu baskı üretim ile üretilmiştir.
Örümcek robotlar çevrelerini yorumlamak için dâhili kameralar ve lazer tarayıcı kullanırlar (KAYNAK: SIEMENS)
Katmanlı Üretim ve Endüstri 4.0
Katmanlı Üretim gereksinimlere göre kısa sürede parça üretilmesi ve maliyet ya da süre kısıtı olmadan tasarım değişikliği yapılmasını sağlar. Katmanlı üretim, tasarım sınırlarını kaldırır, karmaşık geometriler ve yapımı güç parçaların üretimini sağlar. Katmanlı Üretim kattığı değer ve faydalar doğrultusunda 4. Sanayi Devrimi konsepti içerisinde önemli bir yere sahiptir. Endüstri 4.0'la sanayi, bileşenleri esnek ve daha kesin her zamankinden daha hızlı üretebilir makinelere ihtiyaç duymaktadır. Az prototip yapımı, daha az kalıp, daha az süreç katkı üretim sayesinde hayata geçmiştir. Siemens’in katmanlı üretime otonom robotları entegre ederek getirdiği mobilite çözümü de bu üretim yönteminin ne kadar farklı şekillerde ve hızda geliştiğini ayrıca diğer teknolojilerle nasıl entegre olabileceğini bize göstermektedir.

Otonom Robotlarla Katmanlı Üretim
Endüstri 4.0’la, nesneler, kendilerini akıllı bağlantılar ve dağıtımlar etrafında organize edebilmekte ve insan hata oranını en aza düşürmeye çalışılmaktadır. Nesneler, entegre iletişim yetenekleri sayesinde, akıllı kararlar alabilmekte ve çevreleriyle sürekli bağlantı ve iletişim halinde bulunarak üretimin tüm aşamalarında tetikte kalabilmektedir. Makine ve parçaların bu öz-örgütlenme yetenekleri tıpkı örümcek robotlardaki gibi başka teknolojilerle entegre haline gelip onların da geliştirilmesini sağlamaktadır. Katmanlı Üretim teknolojisine yeni bir soluk katacak otonom katmanlı üretim robotları da daha önce üç boyutlu baskının yetersiz kaldığı hassas ve zor alanlarda bölgenin düz veya eğimli olmasına bakılmaksızın o bölgeden bağımsız olarak çalışabilmektedir. Birden fazla robot akıllı bir iş birliği içinde oldukça zor alanlarda bir üç boyutlu yazıcı işlevi görmektedir ve kendileri de üç boyutlu baskı tekniğiyle üretilmişlerdir.
Kaynak:
►Siemens

Hakan Kahraman
Elektrik Elektronik Mühendisi. Mesleğinin kapsadığı konularda bilimsel ve teknik yazılar yazmaktadır.
devamı »


















